-
- Downloads
* Added Tutorial
Showing
- doc/tutorial/composite.tex 6 additions, 0 deletionsdoc/tutorial/composite.tex
- doc/tutorial/couple.tex 299 additions, 0 deletionsdoc/tutorial/couple.tex
- doc/tutorial/ellipt.tex 341 additions, 0 deletionsdoc/tutorial/ellipt.tex
- doc/tutorial/examples.tex 15 additions, 0 deletionsdoc/tutorial/examples.tex
- doc/tutorial/fig/ball_half.jpg 0 additions, 0 deletionsdoc/tutorial/fig/ball_half.jpg
- doc/tutorial/fig/boundary_projection.odg 0 additions, 0 deletionsdoc/tutorial/fig/boundary_projection.odg
- doc/tutorial/fig/boundary_projection.pdf 0 additions, 0 deletionsdoc/tutorial/fig/boundary_projection.pdf
- doc/tutorial/fig/coupled_iteration.odg 0 additions, 0 deletionsdoc/tutorial/fig/coupled_iteration.odg
- doc/tutorial/fig/coupled_iteration.pdf 0 additions, 0 deletionsdoc/tutorial/fig/coupled_iteration.pdf
- doc/tutorial/fig/ellipt.jpg 0 additions, 0 deletionsdoc/tutorial/fig/ellipt.jpg
- doc/tutorial/fig/ellipt_dat.jpg 0 additions, 0 deletionsdoc/tutorial/fig/ellipt_dat.jpg
- doc/tutorial/fig/ellipt_macro.odg 0 additions, 0 deletionsdoc/tutorial/fig/ellipt_macro.odg
- doc/tutorial/fig/ellipt_macro.pdf 0 additions, 0 deletionsdoc/tutorial/fig/ellipt_macro.pdf
- doc/tutorial/fig/ellipt_mesh.jpg 0 additions, 0 deletionsdoc/tutorial/fig/ellipt_mesh.jpg
- doc/tutorial/fig/global.pdf 0 additions, 0 deletionsdoc/tutorial/fig/global.pdf
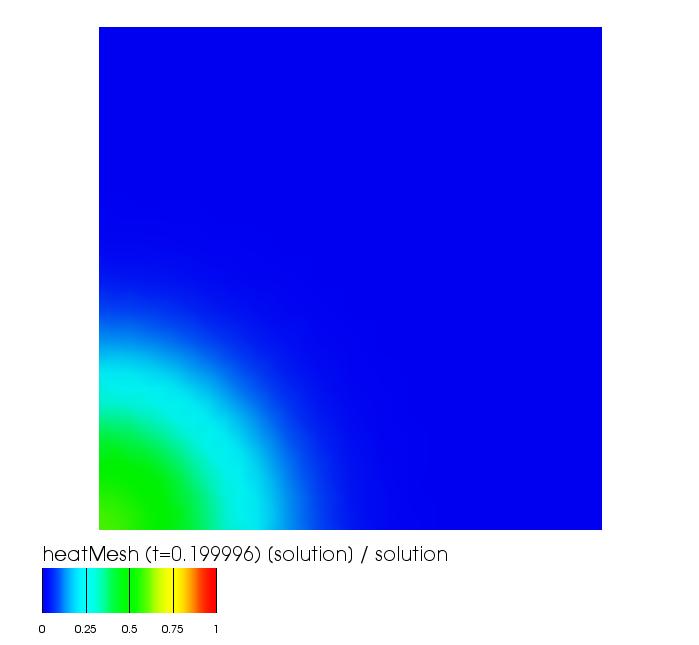
- doc/tutorial/fig/heat1.jpg 0 additions, 0 deletionsdoc/tutorial/fig/heat1.jpg
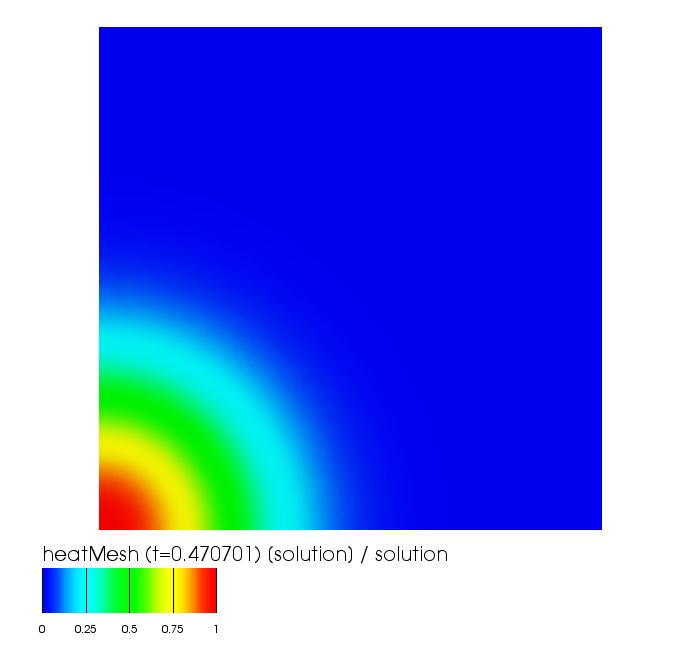
- doc/tutorial/fig/heat2.jpg 0 additions, 0 deletionsdoc/tutorial/fig/heat2.jpg
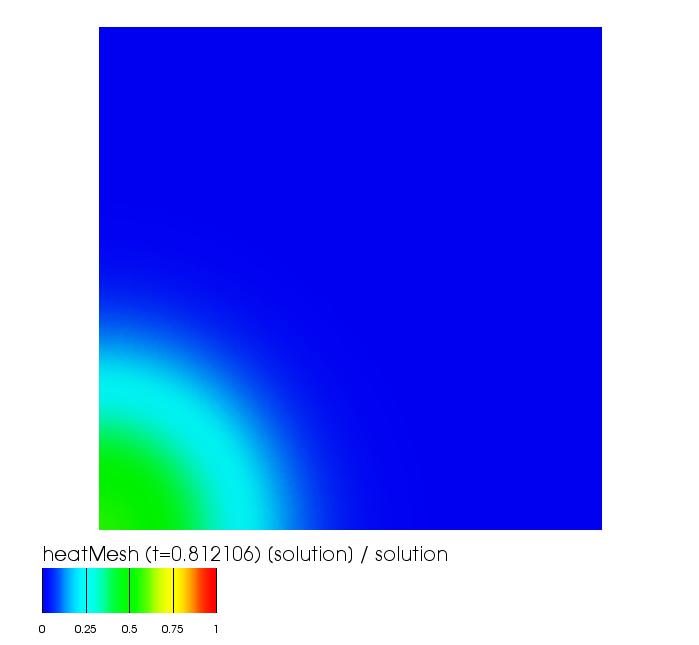
- doc/tutorial/fig/heat3.jpg 0 additions, 0 deletionsdoc/tutorial/fig/heat3.jpg
- doc/tutorial/fig/heat_uml.odg 0 additions, 0 deletionsdoc/tutorial/fig/heat_uml.odg
- doc/tutorial/fig/heat_uml.pdf 0 additions, 0 deletionsdoc/tutorial/fig/heat_uml.pdf
doc/tutorial/composite.tex
0 → 100644
doc/tutorial/couple.tex
0 → 100644
doc/tutorial/ellipt.tex
0 → 100644
doc/tutorial/examples.tex
0 → 100644
doc/tutorial/fig/ball_half.jpg
0 → 100644
{kind=link}
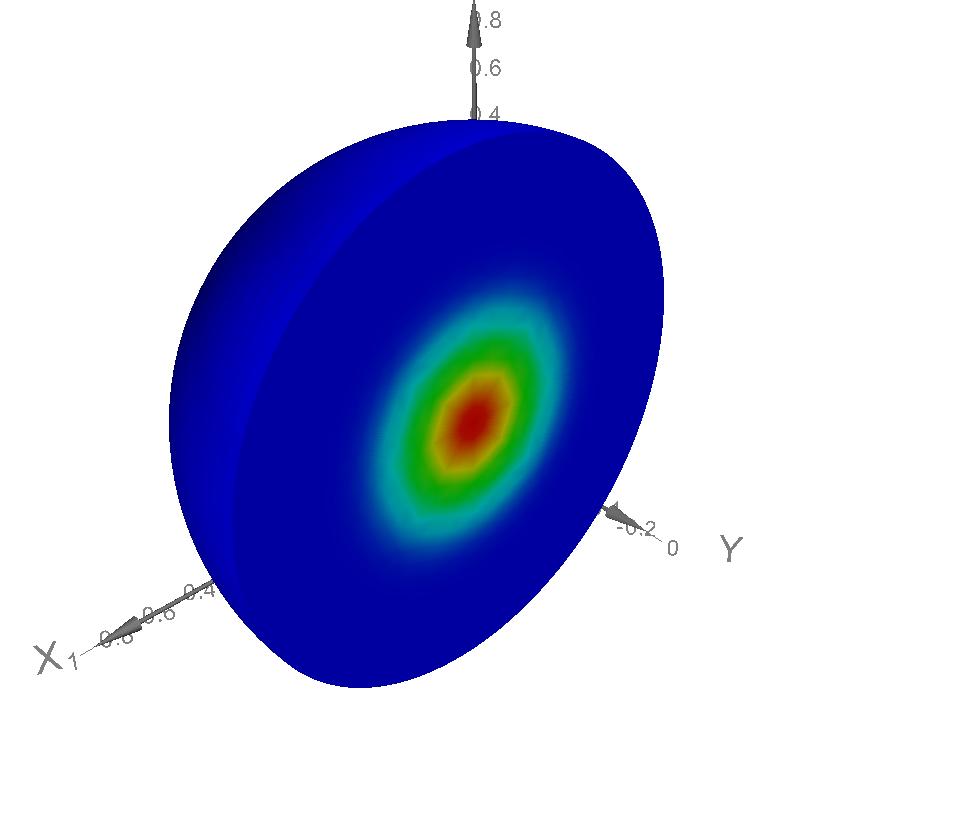
23.8 KiB
doc/tutorial/fig/boundary_projection.odg
0 → 100644
File added
doc/tutorial/fig/boundary_projection.pdf
0 → 100644
File added
doc/tutorial/fig/coupled_iteration.odg
0 → 100644
File added
doc/tutorial/fig/coupled_iteration.pdf
0 → 100644
File added
doc/tutorial/fig/ellipt.jpg
0 → 100644
{kind=link}
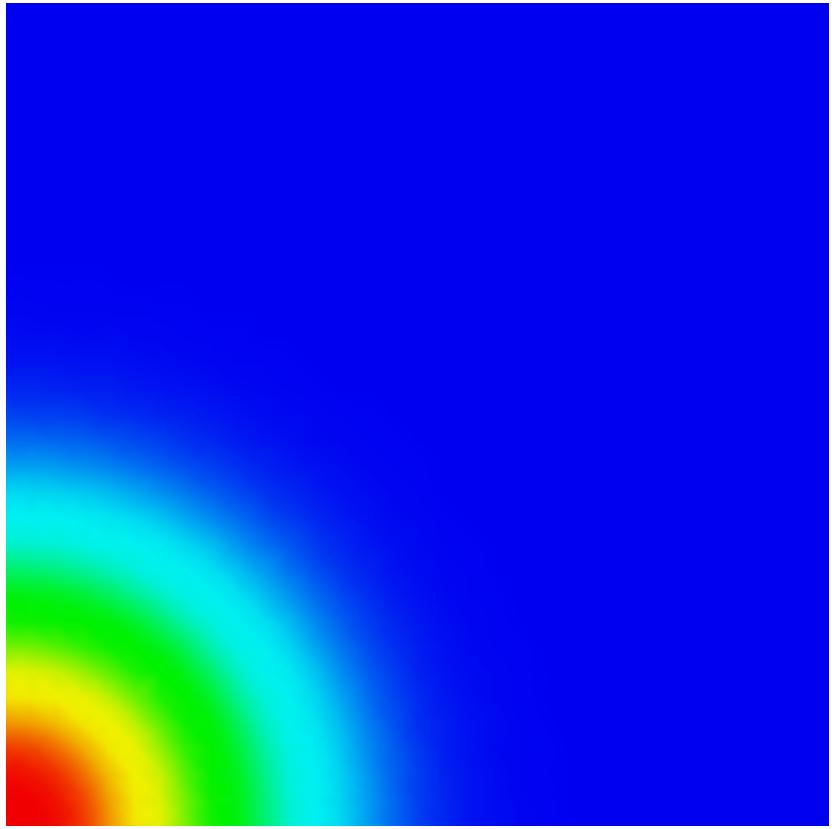
25.9 KiB
doc/tutorial/fig/ellipt_dat.jpg
0 → 100644
{kind=link}
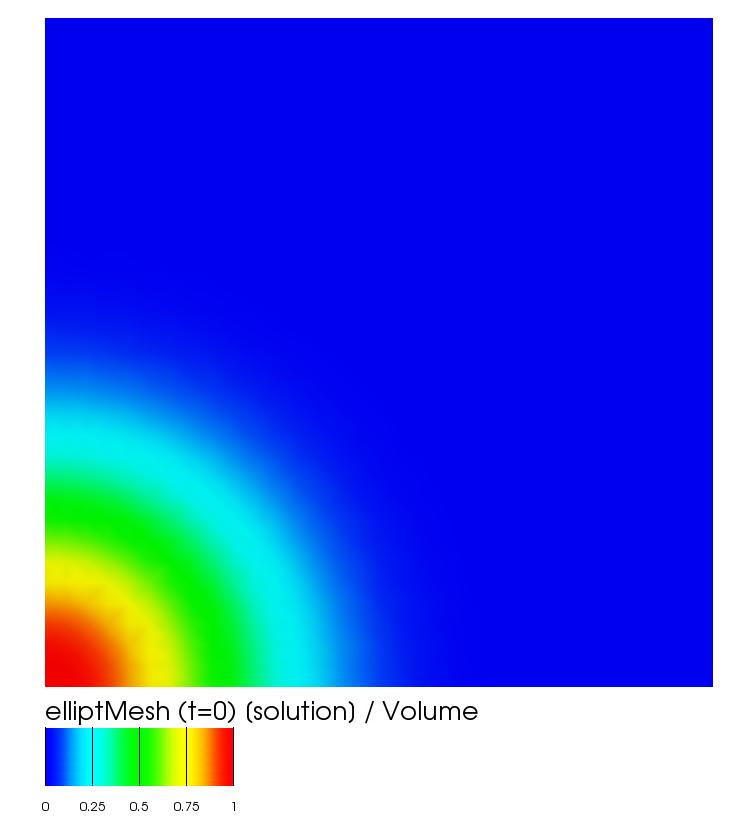
22.4 KiB
doc/tutorial/fig/ellipt_macro.odg
0 → 100644
File added
doc/tutorial/fig/ellipt_macro.pdf
0 → 100644
File added
doc/tutorial/fig/ellipt_mesh.jpg
0 → 100644
{kind=link}
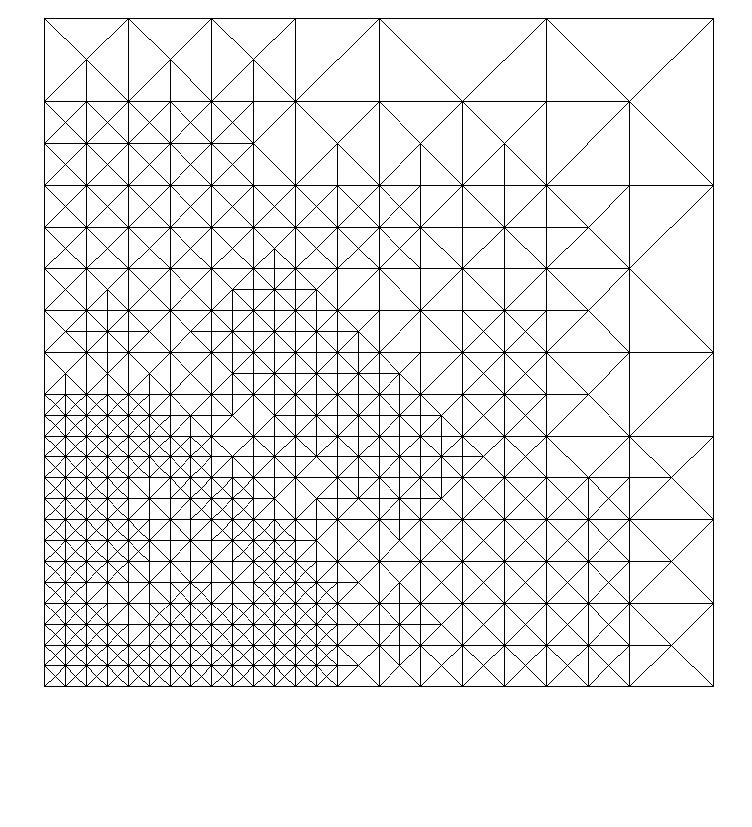
140 KiB
doc/tutorial/fig/global.pdf
0 → 100644
File added
doc/tutorial/fig/heat1.jpg
0 → 100644
{kind=link}
17 KiB
doc/tutorial/fig/heat2.jpg
0 → 100644
{kind=link}
18.1 KiB
doc/tutorial/fig/heat3.jpg
0 → 100644
{kind=link}
17.1 KiB
doc/tutorial/fig/heat_uml.odg
0 → 100644
File added
doc/tutorial/fig/heat_uml.pdf
0 → 100644
File added