-
- Downloads
* Added Tutorial
Showing
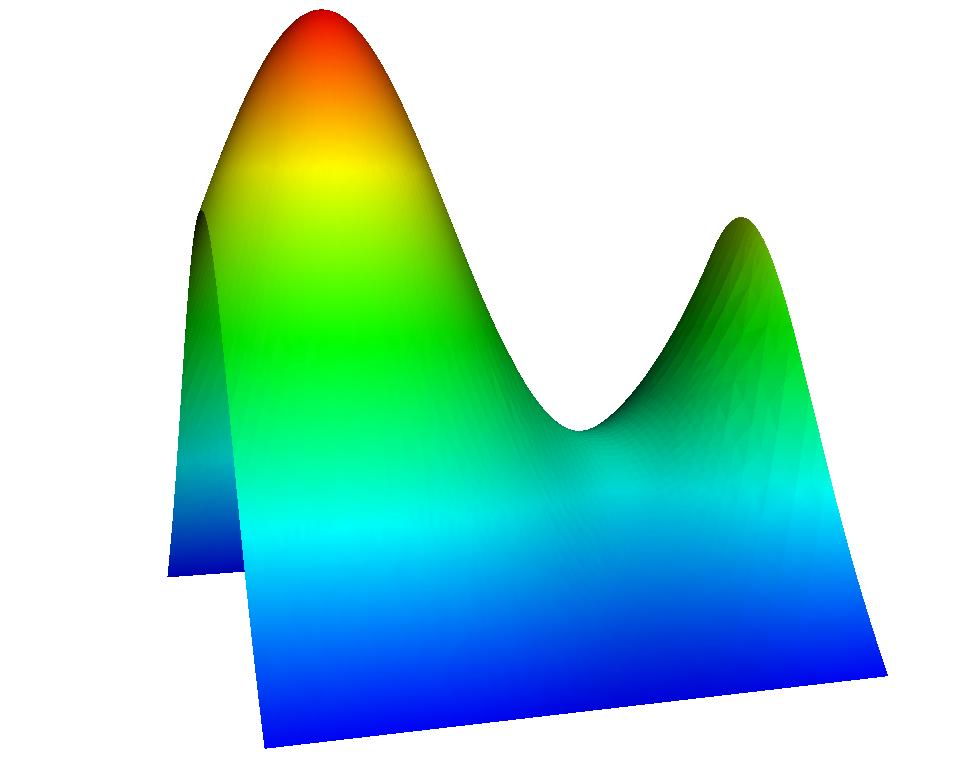
- doc/tutorial/fig/periodic_solution.jpg 0 additions, 0 deletionsdoc/tutorial/fig/periodic_solution.jpg
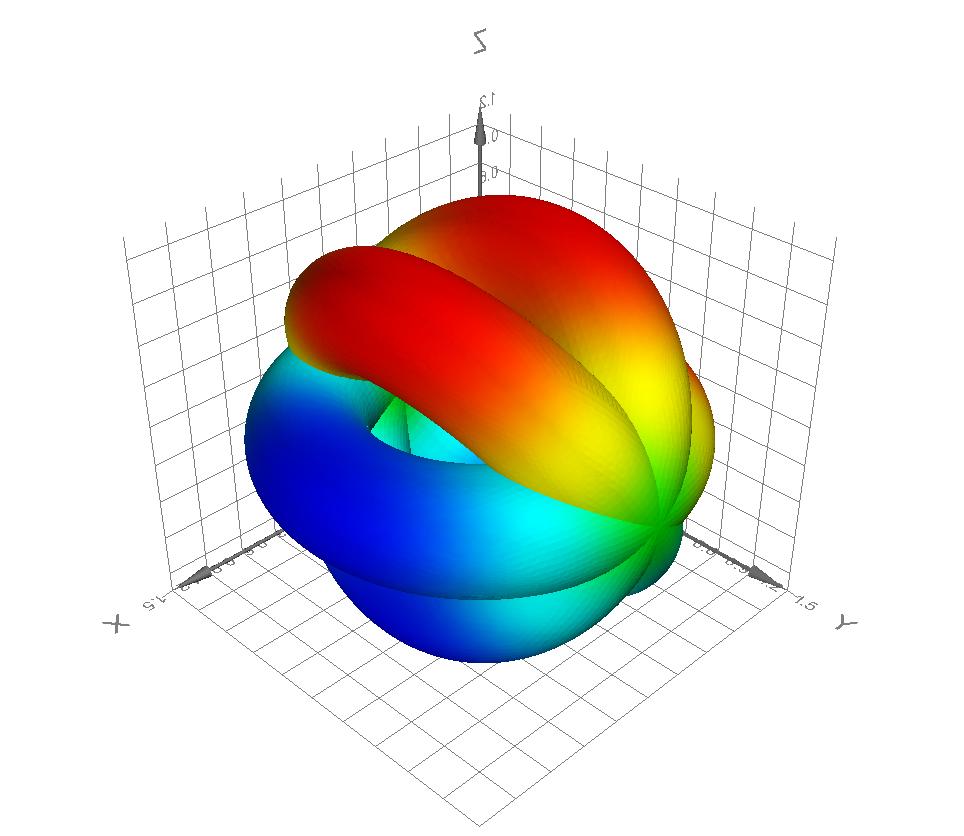
- doc/tutorial/fig/rotated_torus.jpg 0 additions, 0 deletionsdoc/tutorial/fig/rotated_torus.jpg
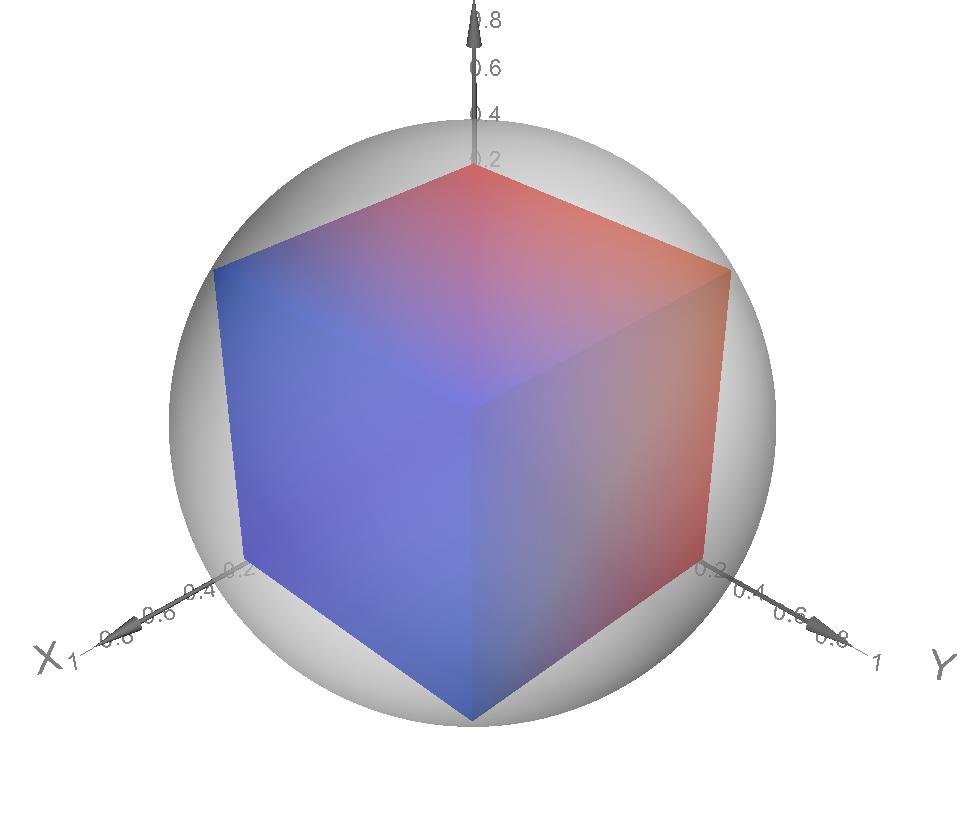
- doc/tutorial/fig/sphere0.jpg 0 additions, 0 deletionsdoc/tutorial/fig/sphere0.jpg
- doc/tutorial/fig/sphere2.jpg 0 additions, 0 deletionsdoc/tutorial/fig/sphere2.jpg
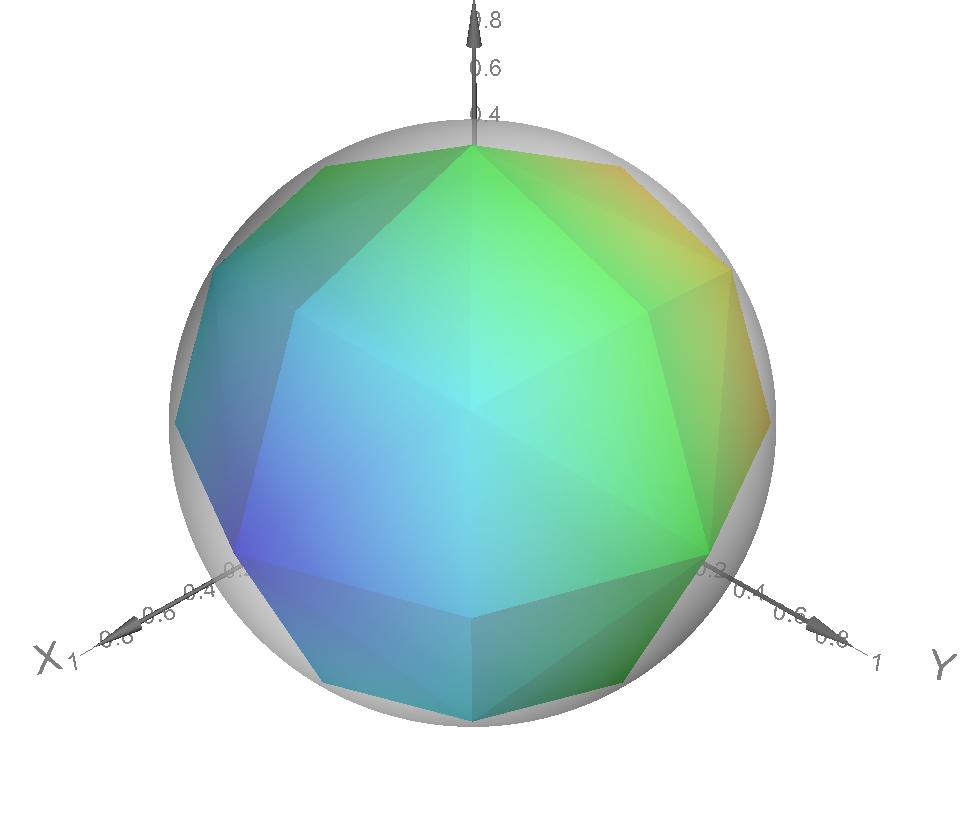
- doc/tutorial/fig/sphere4.jpg 0 additions, 0 deletionsdoc/tutorial/fig/sphere4.jpg
- doc/tutorial/fig/sphere_half.jpg 0 additions, 0 deletionsdoc/tutorial/fig/sphere_half.jpg
- doc/tutorial/fig/sphere_solution.jpg 0 additions, 0 deletionsdoc/tutorial/fig/sphere_solution.jpg
- doc/tutorial/fig/stationary_loop.odg 0 additions, 0 deletionsdoc/tutorial/fig/stationary_loop.odg
- doc/tutorial/fig/stationary_loop.pdf 0 additions, 0 deletionsdoc/tutorial/fig/stationary_loop.pdf
- doc/tutorial/fig/theta.odg 0 additions, 0 deletionsdoc/tutorial/fig/theta.odg
- doc/tutorial/fig/theta.pdf 0 additions, 0 deletionsdoc/tutorial/fig/theta.pdf
- doc/tutorial/fig/threelevels.pdf 0 additions, 0 deletionsdoc/tutorial/fig/threelevels.pdf
- doc/tutorial/fig/torus.odg 0 additions, 0 deletionsdoc/tutorial/fig/torus.odg
- doc/tutorial/fig/torus.pdf 0 additions, 0 deletionsdoc/tutorial/fig/torus.pdf
- doc/tutorial/fig/torus_macro.jpg 0 additions, 0 deletionsdoc/tutorial/fig/torus_macro.jpg
- doc/tutorial/fig/vecellipt0.jpg 0 additions, 0 deletionsdoc/tutorial/fig/vecellipt0.jpg
- doc/tutorial/fig/vecellipt1.jpg 0 additions, 0 deletionsdoc/tutorial/fig/vecellipt1.jpg
- doc/tutorial/fig/volume_projection.odg 0 additions, 0 deletionsdoc/tutorial/fig/volume_projection.odg
- doc/tutorial/fig/volume_projection.pdf 0 additions, 0 deletionsdoc/tutorial/fig/volume_projection.pdf
- doc/tutorial/heat.tex 376 additions, 0 deletionsdoc/tutorial/heat.tex
doc/tutorial/fig/periodic_solution.jpg
0 → 100644
{kind=link}
29.2 KiB
doc/tutorial/fig/rotated_torus.jpg
0 → 100644
{kind=link}
62.1 KiB
doc/tutorial/fig/sphere0.jpg
0 → 100644
{kind=link}
26.9 KiB
doc/tutorial/fig/sphere2.jpg
0 → 100644
{kind=link}
27.8 KiB
doc/tutorial/fig/sphere4.jpg
0 → 100644
{kind=link}
27.6 KiB
doc/tutorial/fig/sphere_half.jpg
0 → 100644
{kind=link}

28.3 KiB
doc/tutorial/fig/sphere_solution.jpg
0 → 100644
{kind=link}
30.1 KiB
doc/tutorial/fig/stationary_loop.odg
0 → 100644
File added
doc/tutorial/fig/stationary_loop.pdf
0 → 100644
File added
doc/tutorial/fig/theta.odg
0 → 100644
File added
doc/tutorial/fig/theta.pdf
0 → 100644
File added
doc/tutorial/fig/threelevels.pdf
0 → 100644
File added
doc/tutorial/fig/torus.odg
0 → 100644
File added
doc/tutorial/fig/torus.pdf
0 → 100644
File added
doc/tutorial/fig/torus_macro.jpg
0 → 100644
{kind=link}

53.3 KiB
doc/tutorial/fig/vecellipt0.jpg
0 → 100644
{kind=link}
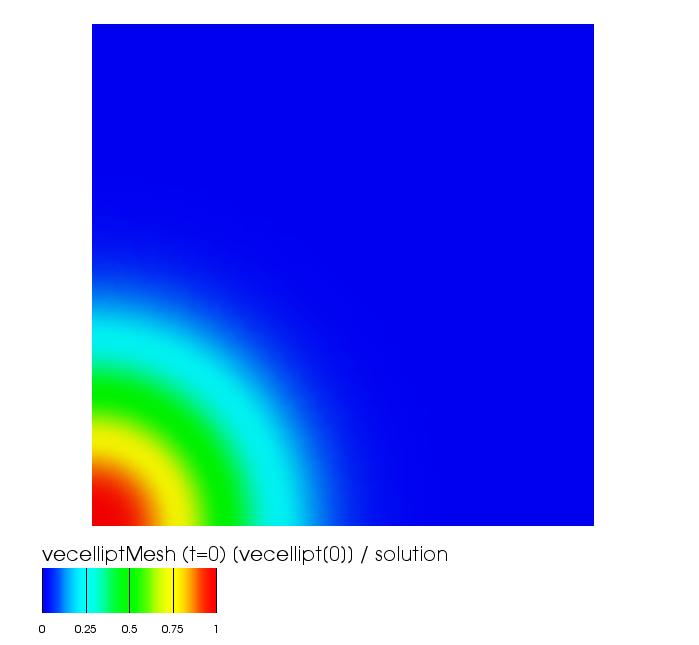
17.3 KiB
doc/tutorial/fig/vecellipt1.jpg
0 → 100644
{kind=link}
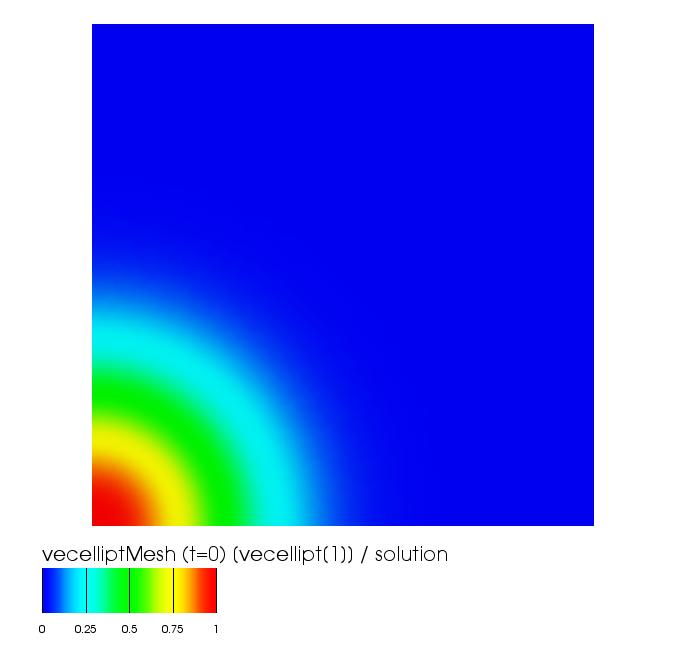
17.2 KiB
doc/tutorial/fig/volume_projection.odg
0 → 100644
File added
doc/tutorial/fig/volume_projection.pdf
0 → 100644
File added
doc/tutorial/heat.tex
0 → 100644